Assuming that your data points are in a N x 3 matrix where N is the total number of points that you have, simply apply a rotation matrix to each point.
You can rotate a point by performing a very simple matrix multiplication. Given a point as a 3 element column vector X, the output point X' is simply:
X' = R*X
R is a rotation matrix. There are three rotation matrices depending on which axis you want to rotate with respect with. In your case, you want to rotate 90 degrees clockwise about the x-axis. The general forms for rotating about each axis in a counter-clockwise direction are given here:
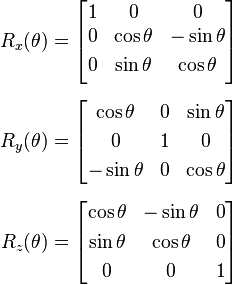
Source: Wikipedia
In your case, you want the first matrix. Because you want to rotate 90 degrees clockwise, you would specify the angle to be -90 degrees. As such, construct your rotation matrix for the x-axis as so:
R = [1 0 0; 0 cosd(-90) -sind(-90); 0 sind(-90) cosd(-90)];
Also, cos(90) = 0 and sin(-90) = -1 assuming degrees, so this really simplifies to:
R =
1 0 0
0 0 1
0 -1 0
To undo the rotation you made, simply apply a 90 degree counter-clockwise rotation, and so substitute 90 degrees into the above expression. Doing this gives us:
R =
1 0 0
0 0 -1
0 1 0
However, your points are in a N x 3 matrix. We want to represent each column as a point, and so what you need to do is transpose your matrix, then do the multiplication, and then transpose back (if desired). Assuming your points are stored in X, just do this:
R = [1 0 0; 0 cosd(-90) -sind(-90); 0 sind(-90) cosd(-90)];
Xrotate = (R*X.').';
Xrotate will contain a N x 3 matrix that contains your rotated points. Each column will be a rotated point given the source point in the original X matrix. It should be noted that each row of X gets rotated and placed into a column in Xrotate and we'll need to transpose this result to get it back into the shape of X. Do your processing, and when you're ready you can rotate your points back. Assuming that Xrotate is N x 3, simply do this:
R2 = [1 0 0; 0 cosd(90); -sind(90); 0 sind(90); cosd(90)];
Xout = (R2*Xrotate.').';
Xout contains the rotation and is re-transposed back so that each row is a point and each column is a dimension.
