The problem:
The goal is to create a disparity map for two parallel cameras. Currently the calculation itself is working, and I have a live disparitymap. It just shows contouring instead of information for every pixel, which is not what a disparity map should be doing.
.
What I have tried:
I tried the tsuka example, the lines are commented out, but they work. So this proves that the used functions work.
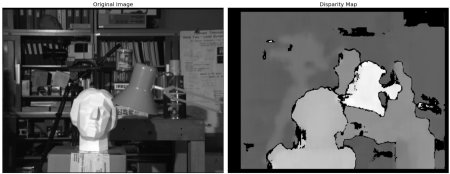
The result of my code is here: https://imgur.com/a/bIDmdkk (I probably don't have the reputation needed to upload images) As can be seen in that image just the outline, the contour, of my face is visible. This contour reacts to my actual distance - with getting brighter or darker - but the rest of the image is dark.
With all parameters commented out (as is the example) it does now work either but has lots and lots of speckles laying over.
I also tried almost any combination of numDisparities and blocksize.
Changing the position of the cameras to one another alters the result but does not change it massively. I made sure to have them in a line with each other, looking in parallel.
Edit: I tinkered a bit and got this result: https://imgur.com/a/m2o9FOE compared to the previous result there are more features, but also more noise. (This one has fewer disparities and another color convertion)
SOLVED: [I tried running the stereo.compute within the while-loop with BGR-Images, but that does not work. The tsuka-example images are colored though, so there might be some case of wrong datatype that I do not see. Everything is uint8 currently.] => I forgot that imread("",0) reads an image as grayscale. So everything behaves as it should in this regard.
.
So what is the difference between my left/right images and the ones resulting in https://docs.opencv.org/master/disparity_map.jpg ?
.
The code:
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
cap1 = cv.VideoCapture(1)
cap3 = cv.VideoCapture(3)
#imgR = cv.imread('tsuL.png',0)
#imgL = cv.imread('tsuR.png',0)
#stereoTest = cv.StereoBM_create(numDisparities=16, blockSize=15)
#disparityTest = stereoTest.compute(imgL,imgR)
while True:
# save current camera image
ret1, frame1 = cap1.read()
ret3, frame3 = cap3.read()
# switch from BGR to gray
grayFrame1 = cv.cvtColor(frame1, cv.COLOR_BGR2GRAY)
grayFrame3 = cv.cvtColor(frame3, cv.COLOR_BGR2GRAY)
# disparity params
stereo = cv.StereoBM_create(numDisparities=128, blockSize=5)
stereo.setTextureThreshold(600)
#stereo.setSpeckleRange(4)
#stereo.setSpeckleWindowSize(9)
stereo.setMinDisparity(0)
# calculate both variants (Camera 1 Left, Camera 2 Right and Camera 1 right, Camera 2 left)
disparity = stereo.compute(grayFrame1,grayFrame3)
disparity2 = stereo.compute(grayFrame3,grayFrame1)
#res = cv.cvtColor(disparity,cv.COLOR_GRAY2BGR)
# Should have been 65535 from int16 to int8, but 4095 works..
div = 65535.0/16
res = cv.convertScaleAbs(disparity, alpha=(255.0/div))
res2= cv.convertScaleAbs(disparity2, alpha=(255.0/div))
# Show disparity map
cv.namedWindow("Disparity")
cv.moveWindow("Disparity", 450, 20)
cv.imshow('Disparity', np.hstack([res,res2]))
keyboard = cv.waitKey(30)
if keyboard == 'q' or keyboard == 27:
break
cap.release()
cv.destroyAllWindows()
New Code
I got the camera calibration data from boofcv and copied some lines from https://stackoverflow.com/a/29151300/13150965 to my code.
Schwarz S/W
Xc 311,0 323,3
Yc 257,1 261,9
fx 603,0 593,6
fy 604,3 596,5
skew
radial 1,43e-01 1,1e-01
-3,03e-01 -2,43e-01
tangential 1,37e-02 1,25e-02
-9,77e-03 -9,79e-04
These are the values I received for each Camera (Schwarz and S/W are just names for each camera, they have different cables, that's how I recognize them)
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
cap1 = cv.VideoCapture(0)
cap3 = cv.VideoCapture(1)
cameraMatrix1 = np.array(
[[603.0, 0, 311.0],
[0, 604.3, 257.1],
[0, 0, 1]]
)
cameraMatrix2 = np.array(
[[593.6, 0, 323.3],
[0, 596.5, 261.9],
[0, 0, 1]]
)
distCoeffs1 = np.array([[0.143, -0.303, 0.0137, -0.00977, 0.0]])
distCoeffs2 = np.array([[0.11, -0.243, 0.0125, -0.000979, 0.0]])
R = np.array(
[[1.0, 0.0, 0.0],
[0.0, 1.0, 0.0],
[0.0, 0.0, 1.0]]
)
T = np.array(
[[98.0],
[0.0],
[0.0]]
)
# Params from camera calibration
camMats = [cameraMatrix1, cameraMatrix2]
distCoeffs = [distCoeffs1, distCoeffs2]
camSources = [0,1]
for src in camSources:
distCoeffs[src][0][4] = 0.0 # use only the first 2 values in distCoeffs
xOff = 450
div = 64.0
i = 0
while True:
# save current camera image
ret1, frame1 = cap1.read()
ret3, frame3 = cap3.read()
w, h = frame1.shape[:2]
# The rectification process
newCams = [0,0]
roi = [0,0]
frames = [frame1, frame3]
i = i + 1
if i > 10:
for src in camSources:
newCams[src], roi[src] = cv.getOptimalNewCameraMatrix(cameraMatrix = camMats[src],
distCoeffs = distCoeffs[src],
imageSize = (w,h),
alpha = 0)
rectFrames = [0,0]
for src in camSources:
rectFrames[src] = cv.undistort(frames[src], camMats[src], distCoeffs[src])
R1,R2,P1,P2,Q,roi1,roi2 = cv.stereoRectify(
cameraMatrix1 =camMats[0],
cameraMatrix2 =camMats[1],
distCoeffs1 =distCoeffs1,
distCoeffs2 =distCoeffs2,
imageSize = (w,h),
R=R,
T=T,
alpha=1
)
# show camera images
cv.namedWindow("RectFrames")
cv.moveWindow("RectFrames", xOff, 532)
cv.imshow('RectFrames', np.hstack([rectFrames[0],rectFrames[1]]))
# switch from BGR to gray
grayFrame1 = cv.cvtColor(rectFrames[0], cv.COLOR_BGR2GRAY)
grayFrame3 = cv.cvtColor(rectFrames[1], cv.COLOR_BGR2GRAY)
# disparity params
stereo = cv.StereoBM_create(numDisparities=16, blockSize=15)
# calculate both variants (Camera 1 Left, Camera 2 Right and Camera 1 right, Camera 2 left)
disparity = stereo.compute(grayFrame1,grayFrame3)
disparity2 = stereo.compute(grayFrame3,grayFrame1)
# Should have been 65535 from int16 to int8, but 4095 works..
res = cv.convertScaleAbs(disparity, alpha=(255.0/(div-1)))
res2= cv.convertScaleAbs(disparity2, alpha=(255.0/(div-1)))
# Show disparity map
cv.namedWindow("Disparity")
cv.moveWindow("Disparity", xOff, 20)
cv.imshow('Disparity', np.hstack([res,res2]))
keyboard = cv.waitKey(30)
if keyboard == 'q' or keyboard == 27:
break
cap.release()
cv.destroyAllWindows()
I can see, that the images are being undistorted. https://imgur.com/a/SBmv7IY
But I am still doing something wrong.
The R and T are made up, as they look parallel (No Rotation) and are 9.8cm apart from another.
The Values for R and T calculated via the script from StereoCalibration in OpenCV on Python resulted in the unity-matrix for R and an empty vector for T. The latter cannot be right.
I now got the R and T values for a given calibration of the cameras. But it does in fact not solve my problem. So either there is still an error in that calculation or this problem has to be solved differently.
I rewrote the entire script, to see at which step it misbehaves - and do tidy things up. At is stands, the calibration works up to the cv2.initUndistortRectifyMap , if I use this map with cv2.remap onto my camera image, I just get a black image.
import numpy as np
import cv2
from VideoCapture import Device
from PIL import Image
import glob
print("Importing Images")
image_listR = []
image_listL = []
w = 640
h = 480
for filename in glob.glob('StereoCalibrate\imageR*'): #assuming gif
im=Image.open(filename).convert('RGB')
cvim= np.array(im)
cvim = cvim[:, :, ::-1].copy()
image_listR.append(cvim)
for filename in glob.glob('StereoCalibrate\imageL*'): #assuming gif
im=Image.open(filename).convert('RGB')
cvim= np.array(im)
cvim = cvim[:, :, ::-1].copy()
image_listL.append(cvim)
imagesR = len(image_listR)
imagesL = len(image_listL)
print("Found {%d} images for Left camera" % imagesL)
print("Found {%d} images for Right camera" % imagesR)
if imagesR == imagesL:
print("Number of Images match")
else:
print("Number of Images do not match")
print("Using loaded images")
board_w = 8
board_h = 5
board_sz = (8,5)
board_n = board_w*board_h
# termination criteria
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# Arrays to store object points and image points from all the images.
object_points = [] # 3d point in real world space
imagePoints1 = [] # 2d points in image plane.
imagePoints2 = [] # 2d points in image plane.
corners1 = []
corners2 = []
obj = np.zeros((5*8,3), np.float32)
obj[:,:2] = np.mgrid[0:8,0:5].T.reshape(-1,2)
vidStreamL = cv2.VideoCapture(1) # index of your camera
vidStreamR = cv2.VideoCapture(0) # index of your camera
success = 0
found1 = False
found2 = False
i=0
while (success < imagesR*0.9):
#Loop through the image list
if i >= imagesL:
i = 0
img1 = image_listL[i]
img2 = image_listR[i]
#Convert images to grayscale
gray1 = cv2.cvtColor(img1,cv2.COLOR_BGR2GRAY)
gray2 = cv2.cvtColor(img2,cv2.COLOR_BGR2GRAY)
#Check for Chessboard Pattern
found1, corners1 = cv2.findChessboardCorners(img1, board_sz)
found2, corners2 = cv2.findChessboardCorners(img2, board_sz)
#Draw Chessboard in image
if (found1):
cv2.cornerSubPix(gray1, corners1, (11, 11), (-1, -1),criteria)
cv2.drawChessboardCorners(gray1, board_sz, corners1, found1)
if (found2):
cv2.cornerSubPix(gray2, corners2, (11, 11), (-1, -1), criteria)
cv2.drawChessboardCorners(gray2, board_sz, corners2, found2)
#Show grayscale image with chessboard marker
cv2.imshow('image1', gray1)
cv2.imshow('image2', gray2)
if (found1 != 0 and found2 != 0):
#Remove successful detected images from list
image_listL.pop(i)
image_listR.pop(i)
imagesL-=1
imagePoints1.append(corners1);
imagePoints2.append(corners2);
object_points.append(obj);
success+=1
print("{", success, "} / {",imagesR*0.9,"} calibration images detected")
if (success >= imagesR*0.9):
break
i = i + 1
cv2.waitKey(1)
cv2.destroyAllWindows()
print("Calibrating")
cx1 = 327.0
cy1 = 247.9
fx1 = 608.3
fy1 = 607.7
rx1 = 0.129
ry1 = -0.269
tx1 = 0.00382
ty1 = -0.00151
camMat1 = np.array(
[[fx1, 0, cx1],
[0, fy1, cy1],
[0, 0, 1]])
cx2 = 329.8
cy2 = 249.0
fx2 = 601.7
fy2 = 601.1
rx2 = 0.149
ry2 = -0.322
tx2 = 0.0039
ty2 = -0.000837
camMat2 = np.array(
[[fx2, 0, cx2],
[0, fy2, cy2],
[0, 0, 1]])
disCoe1 = np.array([[0.0,0.0,0.0,0.0,0.0]])
disCoe2 = np.array([[0.0,0.0,0.0,0.0,0.0]])
R = np.zeros(shape=(3,3))
T = np.zeros(shape=(3,3))
E = np.zeros(shape=(3,3))
F = np.zeros(shape=(3,3))
retval, camMat1, disCoe1, camMat2, disCoe2, R, T, E, F = cv2.stereoCalibrate(object_points, imagePoints1, imagePoints2, camMat1, disCoe1, camMat2, disCoe2, (w, h), flags = cv2.CALIB_USE_INTRINSIC_GUESS)
print("Done Calibration\n")
R1 = np.zeros(shape=(3,3))
R2 = np.zeros(shape=(3,3))
P1 = np.zeros(shape=(3,4))
P2 = np.zeros(shape=(3,4))
print("T:")
print('\n'.join([' '.join(['{:4}'.format(item) for item in row])
for row in T]))
print("E:")
print('\n'.join([' '.join(['{:4}'.format(item) for item in row])
for row in E]))
print("F:")
print('\n'.join([' '.join(['{:4}'.format(item) for item in row])
for row in F]))
print("R:")
print('\n'.join([' '.join(['{:4}'.format(item) for item in row])
for row in R]))
print("CAM1:")
print('\n'.join([' '.join(['{:4}'.format(item) for item in row])
for row in camMat1]))
print("CAM2:")
print('\n'.join([' '.join(['{:4}'.format(item) for item in row])
for row in camMat2]))
print("DIS1:")
print('\n'.join([' '.join(['{:4}'.format(item) for item in row])
for row in disCoe1]))
print("DIS2:")
print('\n'.join([' '.join(['{:4}'.format(item) for item in row])
for row in disCoe2]))
print("Rectifying cameras")
cv2.stereoRectify(camMat1, disCoe1, camMat2, disCoe2,(w, h), R, T)
#print("Undistort image")
#map1x, map1y = cv2.initUndistortRectifyMap(camMat1, disCoe1, R1, camMat1, (w, h), cv2.CV_32FC1)
#map2x, map2y = cv2.initUndistortRectifyMap(camMat2, disCoe2, R2, camMat2, (w, h), cv2.CV_32FC1)
print("Settings complete\n")
i = 1
j = 1
while(True):
retL, img1 = vidStreamL.read()
retR, img2 = vidStreamR.read()
img1 = cv2.undistort(img1, camMat1, disCoe1)
img2 = cv2.undistort(img2, camMat2, disCoe2)
cv2.imshow("ImgCam", np.hstack([img1,img2]));
#imgU1 = np.zeros((h,w,3), np.uint8)
#imgU2 = np.zeros((h,w,3), np.uint8)
#imgU1 = cv2.remap(img1, map1x, map1y, cv2.INTER_LINEAR, imgU1, cv2.BORDER_CONSTANT, 0)
#imgU2 = cv2.remap(img2, map2x, map2y, cv2.INTER_LINEAR, imgU2, cv2.BORDER_CONSTANT, 0)
#cv2.imshow("ImageCam", np.hstack([imgU1,imgU2]));
#imgU1 = cv2.cvtColor(imgU1, cv2.COLOR_BGR2GRAY)
#imgU2 = cv2.cvtColor(imgU2, cv2.COLOR_BGR2GRAY)
img1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY)
img2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
stereo = cv2.StereoBM_create(numDisparities=16, blockSize=15)
disparity = stereo.compute(img1,img2)
disparit2 = stereo.compute(img2,img1)
res = cv2.convertScaleAbs(disparity, alpha=(255.0/512.0))
re2 = cv2.convertScaleAbs(disparit2, alpha=(255.0/512.0))
cv2.namedWindow("Disparity")
cv2.imshow('Disparity', np.hstack([res,re2]))
cv2.waitKey(1)
Output:
Importing Images
Found {90} images for Left camera
Found {90} images for Right camera
Number of Images match
Using loaded images
{ 1 } / { 81.0 } calibration images detected
{ 2 } / { 81.0 } calibration images detected
...
{ 81 } / { 81.0 } calibration images detected
Calibrating
Done Calibration
T:
-3.4549164747952514
-0.15507627811210184
-0.058176064658149625
E:
0.0009397723130476023 0.05762864132890782 -0.15527769659160615
-0.01780225919479015 0.01349075458635349 3.455334047732434
-0.008356129824974412 -3.458367965240172 0.010848591597549652
F:
3.59441069386539e-08 2.1966757991956236e-06 -0.0032581679670958268
-6.799554333159719e-07 5.135279707045414e-07 0.060534502577423176
6.856712419870922e-06 -0.061575681061419536 1.0
R:
0.9988149170858261 -0.0472903202575948 -0.01150595570860947
0.047251107481307925 0.998876350140538 -0.0036564971909233096
0.011665943966274269 0.0031084947887139625 0.9999271188499311
CAM1:
457.8949692862012 0.0 333.02411929079784
0.0 459.45537763505865 239.7961684844508
0.0 0.0 1.0
CAM2:
460.4374113961873 0.0 342.68117331116434
0.0 461.07367491328057 244.62051778708334
0.0 0.0 1.0
DIS1:
0.06391854958023913 -0.2191286122082927 -0.000947168228999159 0.004660285089171575 0.08044318478168837
DIS2:
0.011643796283126952 0.14239490114798584 0.001548517080560543 0.011862118627062223 -0.5191998209097282
Rectifying cameras
Settings complete

{kind=link}